AI & Interaction
Few of my personal projects, publications and works with various organisations across the globe are listed below.
GANs to Simulate the Dynamics of Weather and Climate
Guided by Dr.Adway Mitra | Center for Excellence in AI, IIT Kharagpur
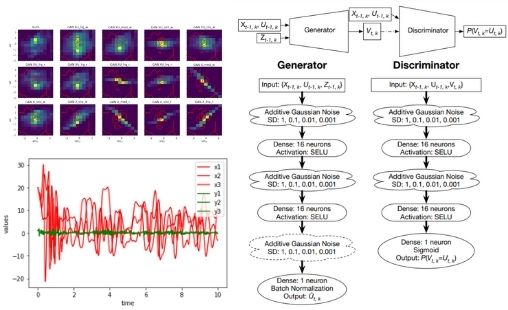 Weather has fast dynamics, and climate has slow dynamics. The interactions between a fast and a slow dynamics is modeled well by the Lorenz96 system, which is used to train various Generative Adversial Networks for simulating the dynamics of real weather and climate.
Weather has fast dynamics, and climate has slow dynamics. The interactions between a fast and a slow dynamics is modeled well by the Lorenz96 system, which is used to train various Generative Adversial Networks for simulating the dynamics of real weather and climate.
S.M.A.R.T - Simulation, Monitoring and Augmented Robot Training
Personal Project 2019
 SMART is a flexible platform to simulate and deploy programs for targeted remote robotic devices through an augmented virtual environment over the cloud. It was developed to enable remote training for using various machinery in a safe and cost effective way. (using Unity 3D, Vuforia, Sockets, Arduino)
SMART is a flexible platform to simulate and deploy programs for targeted remote robotic devices through an augmented virtual environment over the cloud. It was developed to enable remote training for using various machinery in a safe and cost effective way. (using Unity 3D, Vuforia, Sockets, Arduino)
MedAI - An intelligent and responsible medical app
Philips India National Hackathon 2019
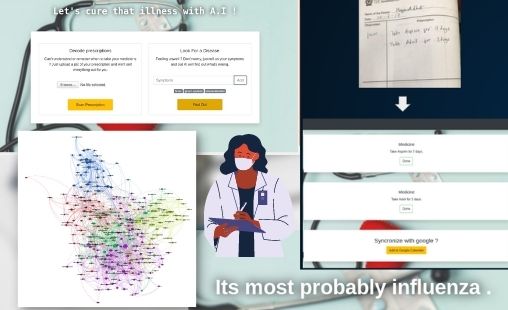 An application to predict diseases through interrogation, understand and organise handwritten medical prescriptions. Using the technique of Apriori Clustering on a dataset of symptoms and related diseases, we create buckets of similar symptoms based on their co-occurrence with the same disease. The user inputs a list of symptoms that he/she is facing and the top three clusters/buckets which contain symptoms that are similar to these symptoms are chosen. With the current list of symptoms, the algorithm tries to find the most probable disease and queries the user with more symptoms relevant to the most probable disease. Depending on the user response to these symptoms, confidence in the top three diseases is computed using Naive Bayes Algorithm and the most likely disease is identified by the algorithm. (using Keras, TF, OpenCV, Azure Vision api, MedaCy, Python Flask, BootStrap)
An application to predict diseases through interrogation, understand and organise handwritten medical prescriptions. Using the technique of Apriori Clustering on a dataset of symptoms and related diseases, we create buckets of similar symptoms based on their co-occurrence with the same disease. The user inputs a list of symptoms that he/she is facing and the top three clusters/buckets which contain symptoms that are similar to these symptoms are chosen. With the current list of symptoms, the algorithm tries to find the most probable disease and queries the user with more symptoms relevant to the most probable disease. Depending on the user response to these symptoms, confidence in the top three diseases is computed using Naive Bayes Algorithm and the most likely disease is identified by the algorithm. (using Keras, TF, OpenCV, Azure Vision api, MedaCy, Python Flask, BootStrap)
Connect-All, Hack-A-Bit 2019
Hackathon Project
 Developed in 36hrs, ConnectAll is a platform that enables specially-abled to easily interact with conventional tech by converting one form of communication to another. Eg: sign language to text or speech. All forms of input are converted into raw text using various neural networks, azure vision api, and back to the desired output. (Javascript, OpenCV, Azure Vision api, Python Flask, Full Stack).
Developed in 36hrs, ConnectAll is a platform that enables specially-abled to easily interact with conventional tech by converting one form of communication to another. Eg: sign language to text or speech. All forms of input are converted into raw text using various neural networks, azure vision api, and back to the desired output. (Javascript, OpenCV, Azure Vision api, Python Flask, Full Stack).
CodAR, Poster Publication | ICCE 2019
27th International Conference on Computers in Education, Taiwan
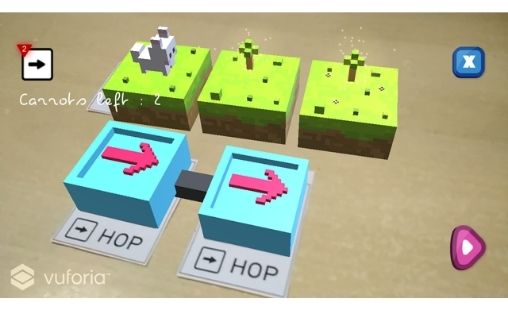 Talukdar, J., Sharma, V., Bhagat, K.K. (ICCE 2019) CodAR : An augmented reality based game to teach programming. Development and evaluation of an augmented reality based immersive game to teach programming with the help of cards.
Talukdar, J., Sharma, V., Bhagat, K.K. (ICCE 2019) CodAR : An augmented reality based game to teach programming. Development and evaluation of an augmented reality based immersive game to teach programming with the help of cards.
VR ( Virtual Reality ) Interactive Education Platform
SDE Intern 2020 - RISE Cyprus Interaction Media Lab
 Authored a Virtual Reality content creation and sharing educational platform (using Unity 3D). Developed (flask) backend with (mongodb) database and user authentication. Implemented data serialization and handling , session management, etc.
Authored a Virtual Reality content creation and sharing educational platform (using Unity 3D). Developed (flask) backend with (mongodb) database and user authentication. Implemented data serialization and handling , session management, etc.
Robot IOT based Learning System
Research Internship - Research Center for Smart Learning (RCSL), Yuntech, Taiwan
 Implemented IOT functionalities (mqtt) over a robot based multi-modal learning system. Developed a program to demonstrate the extensive features of the new system which was tested with students.
Implemented IOT functionalities (mqtt) over a robot based multi-modal learning system. Developed a program to demonstrate the extensive features of the new system which was tested with students.
Dynamic Puzzle System
SDE Intern 2019 - ClassHero, Vancouver
 Developed a system for dynamic and consistent math puzzle generation (using nodejs and express). Implemented user data and game state storage into a (mongodb) database. Designed, developed and integrated a web application to craft visual stories/puzzles (using bootstrap, jquery and vis.js)
Developed a system for dynamic and consistent math puzzle generation (using nodejs and express). Implemented user data and game state storage into a (mongodb) database. Designed, developed and integrated a web application to craft visual stories/puzzles (using bootstrap, jquery and vis.js)
Nexus Pi Bot, Autonomous Navigation Robot
Campus Tech Competition
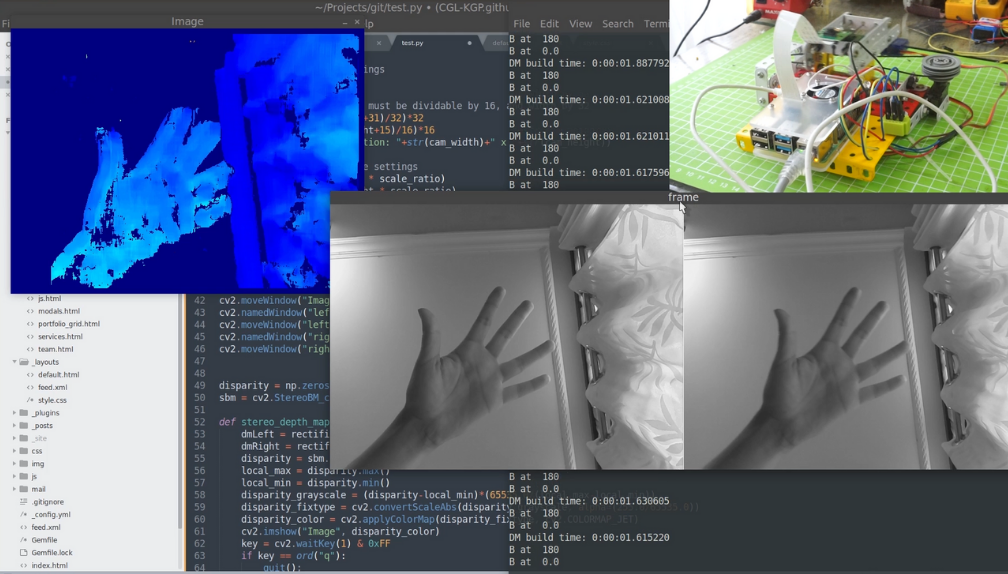
 An autonomous robot for ground navigation using a monocular vision camera made over Raspberry Pi 4. Nexus Pi uses conventional image processing techniques to detect symbols on the test arena and make decisions to achieve the required goals.( OpenCV, Path Planning, Raspberry Pi ).
An autonomous robot for ground navigation using a monocular vision camera made over Raspberry Pi 4. Nexus Pi uses conventional image processing techniques to detect symbols on the test arena and make decisions to achieve the required goals.( OpenCV, Path Planning, Raspberry Pi ).
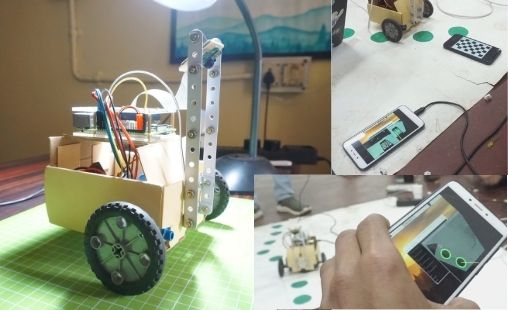
Pixelation Maze Solver
National Students Space Challange 2018
![]() An autonomous robot to find its way through a maze ( path planning - dijkstra in cpp ) while communicating with an overhead camera ( OpenCV and Serial ).
An autonomous robot to find its way through a maze ( path planning - dijkstra in cpp ) while communicating with an overhead camera ( OpenCV and Serial ).